 迁址公告
迁址公告
 古东管家APP
古东管家APP
 关于我们
关于我们
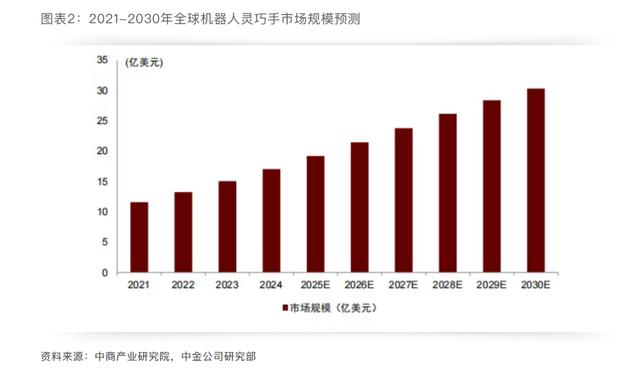
2026年还未过半,具身智能行业已经收获了羡煞旁人的超300亿元融资。随之而来的是关注点的细化。越来越多机构开始关注灵巧手等部件,包括特斯拉Optimus,市场也格外关注它的手。

跳舞、跑步、散打,这些炫技点主要在腿和电机,为什么要关注手?因为机器人公司只会把它们擅长的部分展示出来,不那么明显的部分,要么不够重要,要么就是依然存在壁垒。手,自然不可能不重要。
1月底,智元机器人分拆灵巧手子公司“临界点”,连续拿下两轮融资。4月底,独角兽公司灵心巧手完成B+轮融资,这是它一年内第七轮融资,“可怕”的是,媒体报道其已经在寻求新一轮融资,目标估值60亿美元(约合人民币430亿元),较之前翻倍。
这双“手”,甚至比很多本体公司更昂贵。原因何在?
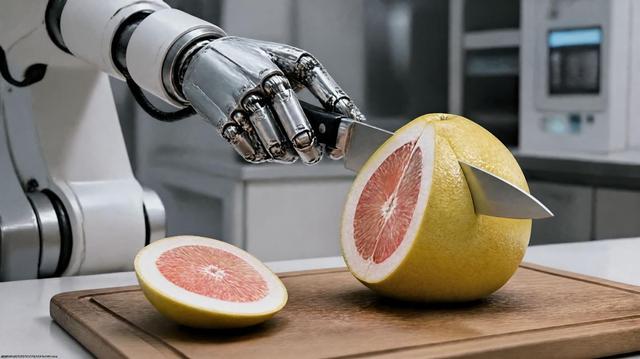
其实在大模型狂飙的两年里,AI最擅长的事情,几乎都发生在屏幕里,比如写代码。但只要把场景从对话框挪到真实世界,难度就立刻反转——让机器人稳稳捏起一颗草莓,不压碎它,再顺手拎起一口铸铁锅去炒菜,这件事的技术门槛,比写出一篇AI论文要高得多。
这就是莫拉维克悖论的现实版本:对人类来说几乎不需思考的感知与动作,对人工智能却是最棘手的难题。人类花了几百万年,把手进化成一套极致通用的接口,可以在五指之间映射几千年来的手艺和工具文明;而机器人世界的大部分玩家,只能拙劣地模仿。
当下关于具身智能的想象,大多停留在人形机器人的全身轮廓。真正决定机器人是否能走进厨房、工厂和养老院的,仍然是经常被忽略的末端执行器——它到底能不能像人一样抓、拧、插、戳,能不能承受长期的磨损、故障和成本压力。
过去一年,国内末端执行器相关融资超过二十起,超过三十亿元真金白银押在这个看似细分的零部件上。相比腿足、关节甚至整机,“灵巧手”被寄托了新的希望。
一、为什么所有人都在等那只“手”
如果把当下主流AI路线压缩成一句话,可以概括为:不断用更大的算力和数据,放大机器在“理解”和“生成”上的能力。它的优势在于工程产出快、商业化路径清晰、对资本友好——更多数据、更大模型、更精细的对齐,KPI往往就能看得见。
但是,说得好不好和做得成不成是两个问题,这套范式几乎不碰物理世界,就缺乏向世界拓展用途的能力。而真正的具身智能不是在屏幕上解释世界,而是在世界里改造世界。而这,也就是灵巧手之所以被资本、创业者和大厂集体盯上的原因。
第一,灵巧手是几乎所有操作型机器人的共同刚需。家务机器人、仓储分拣、人形本体、外科辅助手臂、康复假肢,场景再多样,最后一步都要靠手去完成。
不同于轮式底盘、腿足结构那样强依赖整机设计的部件,灵巧手天然具备更强的通用性和可单独供货能力。一家做得足够好的灵巧手公司,不需要从零造整机,也能向各种机械臂、机器人系统提供标准化接口。
第二,在一台机器人整机的成本结构里,灵巧手虽然只是末端部件,但成本占比可以接近三成。一只性能足够强、可靠性足够高的手,不只是个机械件,而是一块高附加值的利润洼地。对资本来说,既有规模潜力,又有技术含量,自然比某些已经严重内卷的环节更有吸引力。
第三,它的难度高到足以形成门槛,而不是一拥而上的红海。人类手部有27块骨头、22个关节和几十条肌肉协同工作,要在手掌大小的空间里用电机、减速器、连杆和腱绳模拟这一整套结构,同时兼顾重量、强度、散热和耐久,本质上是个“六边形战士”难题:
力矩、灵活度、感知、控制、耐久、成本,每一个维度都拉满,对工程团队、供应链、算法都提出了极高要求。有工程师吐槽,在任何带五指“类人手”的人形机器人上,未来一半的维护时间和成本都会花在修手上。
曾经NASA的Robonaut2手部在材料、传感器、电机上几乎堆到了物理上限,一只手的成本可达25万美元,运转两小时就可能需要一小时的维护。对过去擅长做“大而重”工业部件的企业来说,这样的精密度和维护难度,几乎是另一门完全不同生意。
而且,灵巧手还踩中了一个比技术更深的悖论——人类最不需要思考的动作,往往是最难被复制的。操控一只机械手完成插USB线、拧螺丝的动作,从演示视频里看上去已经很像人类,但只要把它放进高频、不可控的开放环境,问题就立即冒出来——材料疲劳、腱绳磨损、力控误差、触觉缺失,每一个都是具身智能必须直面而无法用算力堆过去的约束。
也就是说,现在的机器人手并不是一般意义上的灵巧,它们对灵巧度的处理方法非常数学化和几何化,而不是人类掌握的、需要的效果。
此外,资本并不是要一只更好看的手,而是谁能在物理约束和商业约束之间,找出一个可持续复制的平衡点。Cost>Control>Dexterity。没有持续供给能力的灵巧,最终都会被成本结构淘汰。
前文提到的融资明星灵心巧手便是一家专门围绕灵巧手做全栈布局的公司,它打造的L20型号产品已成为全球唯一量产超千台的高自由度灵巧手,且正在推动产品走向百元级。此前,它曾拿下全球高自由度灵巧手八成以上出货量,被硅谷科技媒体评为“最具潜力的50家初创公司”之一。

和“让机器人变得更便宜可用”这个目标一致,灵巧手领域的创业公司要脱颖而出,就要聚焦让灵巧手变得便宜可用。而在这个基础上,它们才能讲出更多故事。
二、领先玩家是怎么做的?
灵心巧手成立于2019年,团队的起点不是传统机械企业,而是“灵巧手+云端智脑”的具身智能专用路线。创始人周永来自联想研究院,有十多年互联网产品和机器人经验,核心团队成员来自清华、北大和达闼、九号、遨博等公司。他们相比传统部件厂更擅长工艺和成本控制,更像是一支AI+机器人混编团队。
灵心巧手此前最受关注的是产能和份额,其出货量占整个市场八成以上。单月订单突破千台,月产能超过四千只,自建四家子工厂,与供应链协同交付。去年的短短八个月内,它连续完成超亿元种子轮、数亿元天使轮、A轮和A+轮四笔融资。
全球第一家能把高自由度灵巧手规模化卖出去的公司,是个很好的噱头。但灵心巧手真正有意思的地方,是它一开始就试图从三条线上同时启动飞轮:硬件产品矩阵、全栈自研供应链,以及数据与技能层的云端系统。
在产品层面,它没有选择用一款旗舰机撑起全部故事,而是把用户需求区分为两个方向:一条是追求极致性能的L系列,一条是追求普惠性的O系列。

Linker Hand L20由此诞生:21个自由度,通用和工业双版本,能操作各种人类工具,主要面向科研机构和高端工业应用。更高端的L30则提供22个自由度,直接对标精密装配、手术辅助等场景,单价接近十万元一只。
在国外Shadow Hand一只手卖到一百五十万人民币、耐用性还有限的情况下,灵心巧手希望用性能和价格双重降维,做一只好到足以替代进口的高端手。
另一侧,面向工业普及场景的L6和O6/O7,则把门槛压到万元甚至几千元级。比如L6采用“无刷电机+滚珠丝杠”的自研超强电缸方案,在手掌大小的空间里实现驱控一体化,驱动效率达到九成,丝杠寿命超过百万次。O6则把自重压到370克,在保证六个自由度和五指形态的前提下,把价格做到6666元,Lite版补贴后甚至低至3999元。
灵心巧手显然希望让学习具身智能的学生、早期开发者和小型团队也能买得起真正的灵巧手。
为了做到这一点,灵心巧手选择了从减速器这一层就开始全栈自研:材料、电机、电缸,搭起完整产业链,以此把核心部件的成本优势握在自己手里。一旦未来有更大体量的科技公司和整机厂商杀入赛道,单在硬件端打价格战,未必能够轻易把它挤出市场。
不过,灵心巧手创始人周永的判断是,光靠硬件优势远远不够。等到真正的万亿级科技巨头认真进入灵巧手领域时,对方可以用极高的资本开支吃掉制造端的规模红利。那时候,简单比拼硬件效率,只会被拖进对方擅长的战场。因此,灵心巧手从一开始就试图在数据、算法和生态层面搭一条防线。
在数据采集端,它推出了OpenTeleDex模块化遥操作系统,刻意做成支持任意外接设备、任意机械臂、任意灵巧手的开放架构,让更多开发者可以以更低成本搭起一套遥操作和数据采集环境,不必被锁进封闭整机方案里。
在技能层,它打造了Linker Skill Net多模态数据采集系统,希望逐步构建全球最大的手部技能库。
灵心巧手认为,人类手之所以有独特价值,是因为它具备极强的泛化能力——能操作万种物体、使用万种工具。LinkerSkillNet想做的是一个“技能商店”:未来无论是谁来做具身智能,只要需要让机器人完成插线、拧阀门、系鞋带这类动作,都可以直接调用已经训练好的技能模板,而不是从零开始重训一遍。
对业界资本来说,这是一次典型的平台化叙事:即使有大厂入场,如果灵心巧手已经积累了数千种可直接调用的成熟技能,对方更有动机成为它的客户或合作方,而不是简单复制硬件后从零构建技能库。硬件做的是一次性买卖,技能库则有机会形成持续复用的复利。
在模型训练端,它又通过Dex-Serl真机强化学习框架,把末端力觉和自动化辅助动作算法引入训练过程,让灵巧手可以在真实机械臂上进行高频试错,而不是完全依赖仿真环境。打螺丝、插USB接口这样的任务,演示成功率可以贴近百分之百,这是“硬件+数据+算法”一体化能力的一个直观展示。
最后,在产业协同上,它还和澄凯基金联合发起“百灵计划”,设立具身智能产业基金,投资上下游供应链、模型算法和垂直场景企业;同时提出“灵创巧界”战略,把“灵巧手生产灵巧手”的自我制造概念延伸到自我进化,试图在自家工厂里先完成机器人在真实生产环境中的学习闭环。
今年4月底,灵心巧手还推出了灵心造物大模型,让用户能够通过对话进行任务生成,推动机械手进驻生活。

一整套布局可以浓缩成一句话——灵心巧手想做的不是一只更好的手,而是一条从硬件到技能、再到生态的飞轮。百万只机械手在真实世界里的交互,既是它的商业目标,也是它给自己设定的数据门槛。只有飞轮转起来,它才能守住基础设施的未来。
三、灵巧手及其面临的远期问题
当下,灵巧手乃至整个具身智能领域受到的审视、质疑并不少,有人认为目前只有算法和数据过关,材料学没有突破则很难实现真智能。
MIT计算机科学与人工智能实验室主任Rodney Brooks去年在他的《Why Today’s Humanoids Won’t Learn Dexterity》(为什么机器人学不会真灵巧)博文中提出,一味追捧形态和技能不是万能钥匙,触觉、力控、实时反馈、材料交互等底层物理才是关键。
主流强化学习框架(如用“状态→动作”直接映射)把灵巧当成一种反应问题,但真实人类灵巧是“计划+感知调节”的双层结构——上层是目标导向的抽象子任务规划,比如要切一个柚子,让刀尖刚好切入果皮而不伤果肉,这个空间根本没法用关节角度或像素来定义;下层则是触觉驱动的毫秒级行为调节,比如指尖压力突然变小,立刻停止加力。
在Brooks看来,人类还没想清楚如何表示这种子任务空间,训练模型去学它是很难达成的目标。而且触觉调节又不能靠视觉替代,必须让机器真正“摸得懂”物理信号。所以目前参与机器人赛道的企业们光收集数据是不够的,确定什么是合适的数据、有用的数据,确定合理的训练范式更重要。
而2024年的图灵奖得主Rich Sutton提出了一个更大的问题:人类知识往往会让方法复杂化,不适合机器人的“通用计算”。
何解?人学走路不是先背牛顿定律,而是在接触地面和摔多了之后自然学会。生物学(尤其是人类运动控制)靠的是粗糙但鲁棒的并行试错机制,而人类学者习惯用精确但脆弱的分析式方法去建模它——结果造出的系统既难泛化,又难和真实物理世界对接。所以思维智能上下象棋、绘图等边界明确的任务,计算机强于人类,但端到端模式下的泛化任务,计算机无法形成超越。
他们的思考有收敛趋势,从中,我们可以通过当前灵巧手乃至机器人的发展,做出如下思考:
第一层,是关于“形态与供给”的现实考题。具身智能领域里,关于五指灵巧手的争论从来没有停过:既然三指机械手已经能应付大多数工业和家务场景,为什么还要坚持做一只难度更高、结构更脆弱、成本更昂贵的五指手?如果最终比不过割草机、扫地机器人、洗碗机这一整套专用设备的性价比,那人形和灵巧手的意义又在哪里?
灵心巧手给出的答案并不浪漫。我们认为,无论灵巧手还是机器人,都必须强调Cost>Control>Dexterity原则,本质是一个演化意义上的约束:只有被持续供给、维护和扩展的形态,才有机会成为“文明级部件”。一只极致灵巧但昂贵脆弱的机械手,在生产线上或许可以作为样机展示,但如果无法做到百万级量产,无法在成本和稳定性上达标,它就很难成为行业真正的基础设施。
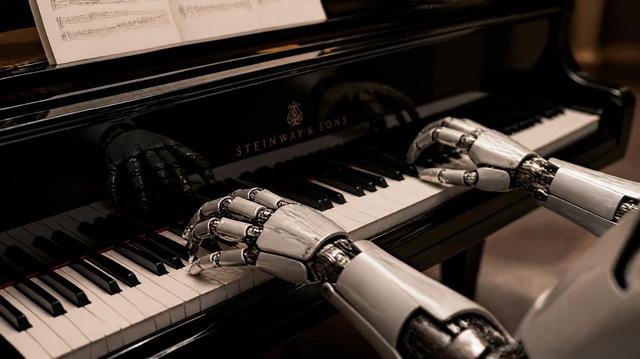
灵巧手之所以值得坚持五指形态,是因为它承载的是人类五千年手工文明留下来的动作资产。弹钢琴、做苏绣、按摩、牙科手术,这些看似与工业无关的动作逻辑,一旦被编码成可迁移的技能模板,就会在更广义的服务经济中找到新的容器。问题不在于能不能模拟出这样一只手,而在于能不能以可接受的价格,把这种能力普惠到尽可能多的机器人身上。
第二层,是关于“智能本质”的路径选择。今天的AI产业更容易被“可扩大的工程复制”所驱动:哪条路能更快看到商业回报、复用路径清晰,资本和人才就会往哪条路涌。这导致了一个微妙的锁定效应——我们花了大量资源,让机器在符号空间里越来越像一个聪明人,却在很久以前就知道:真正难以被复制的是那些嵌在身体里的直觉、触觉和动作智能。
灵巧手这个垂直赛道,在某种意义上是在反向纠偏:它倒逼工程师重新面对智能的具身性——人类之所以能制造工具、使用工具,从生物学上看,很大程度上是因为先有了一双足够通用的手,再在漫长进化中配上更强的大脑。智能和动作的协同演化,是一个远比“算力+数据+算法”的工业范式更长的叙事。
因此,有的创业公司会强调不是要做仿人类的手,而是要做超人类的手,背后其实是一个方法论选择:是把人类的手当作上限去模仿,还是当作一个起点,去探索在不同材料、驱动方式和感知能力下,机器可以进化出怎样新的“手部形态”?如果后者成立,那灵巧手不仅是人类文明的投射,也是一次关于智能载体的反向实验。
第三层,是关于人类社会结构的长期压力。全球老龄化、劳动力成本上升、服务业比重持续走高,这些宏观趋势引出的是同一个问题:有没有一套可复制的、不完全依赖人力的“服务型基础设施”?
从养老护理到家庭服务,从精密制造到极端环境作业,人形机器人当然不是唯一答案,但它的优势在于可以相对低成本地适配既有的空间、工具和工作流程——前提仍然是手足够好用。
也就是说,无论是对灵心巧手还是对其他创业公司,当灵巧手真的能接近百万这类目标的时候,其商业化价值会很可观,但对应的具身智能起飞的一个前提条件会更加动人心魄:一百万只手在真实世界里的持续交互,意味着以往难以捕捉的感知和动作数据被系统化记录下来,人类手部文明第一次有机会以“数据集”的形式被重新审视和组合。
当然,离这个图景成真,还有很长的路要走。从今天的视角看,面对产线磨合、工艺成熟度、订单排期这些工业世界的基本考题,以及预备好在未来某个时刻,迎接大型科技公司的正面进入,是所有创业公司都绕不开的难题。
但至少在当下这个节点上,能够引起外界对人类智能最不起眼、却最本质的那一部分——动手能力——的关注,是很有意义的。

艾伦·图灵在1948年写就的大作《Intelligent Machinery》中提到,获得智能机器最好的方法,是把一个人当成一个完整的系统来看待,然后尝试用机器部件逐个代替他身体和心智的每一部分——这是全机械替代的强人工智能实现路径,但无论如何,缺少身体、环境、时间三者咬合的闭环演化,都会导致他难以在人类社会“生存”下去。
而机器人赛道的诸君很可能低估了这个难度。所以关于机器人,关于灵巧手,业界要做的还有很多。
来源:松果财经
免责声明:所有平台仅提供服务对接功能,资讯信息、数据资料来源于第三方,其中发布的文章、视频、数据仅代表内容发布者个人的观点,并不代表泡财经平台的观点,不构成任何投资建议,仅供参考,用户需独立做出投资决策,自行承担因信赖或使用第三方信息而导致的任何损失。投资有风险,入市需谨慎。
请先登录后发表评论